
尼得科的技术介绍
Nidec's Technology Introduction
日本电产的技术介绍
日本电产的技术介绍
Nidec's Technology Introduction
半导体晶圆搬运机械臂
创新型三连杆机械臂,有助于节省空间
从智能手机、个人电脑和汽车等熟悉的设备到通信网络等社会基础设施。毫不夸张地说,半导体是支撑工业的基础。其制造工序多,对洁净度要求极高。尼得科集团生产用于半导体制造现场搬运基板(晶圆)的机械臂。
机械臂将在预处理工序中接收到的晶圆搬运至下一道工序。近年来,为了保证洁净空间尽可能狭小并在有限的空间内安装更多的半导体制造设备,对紧凑型设备的需求不断增加。
尼得科集团研发的“SR8241”系列超洁净机械臂用于搬运半导体晶圆,它通过自主研发的三连杆结构实现了三连杆机械臂。其他公司使用的是双连杆机械臂,而三连杆机械臂可以缩短每个臂的长度,因此我们成功地将移动范围缩小了72毫米。半导体制造设备领域中对紧凑性的要求通常是以10mm为单位的,三连杆机械臂对该领域影响深远。
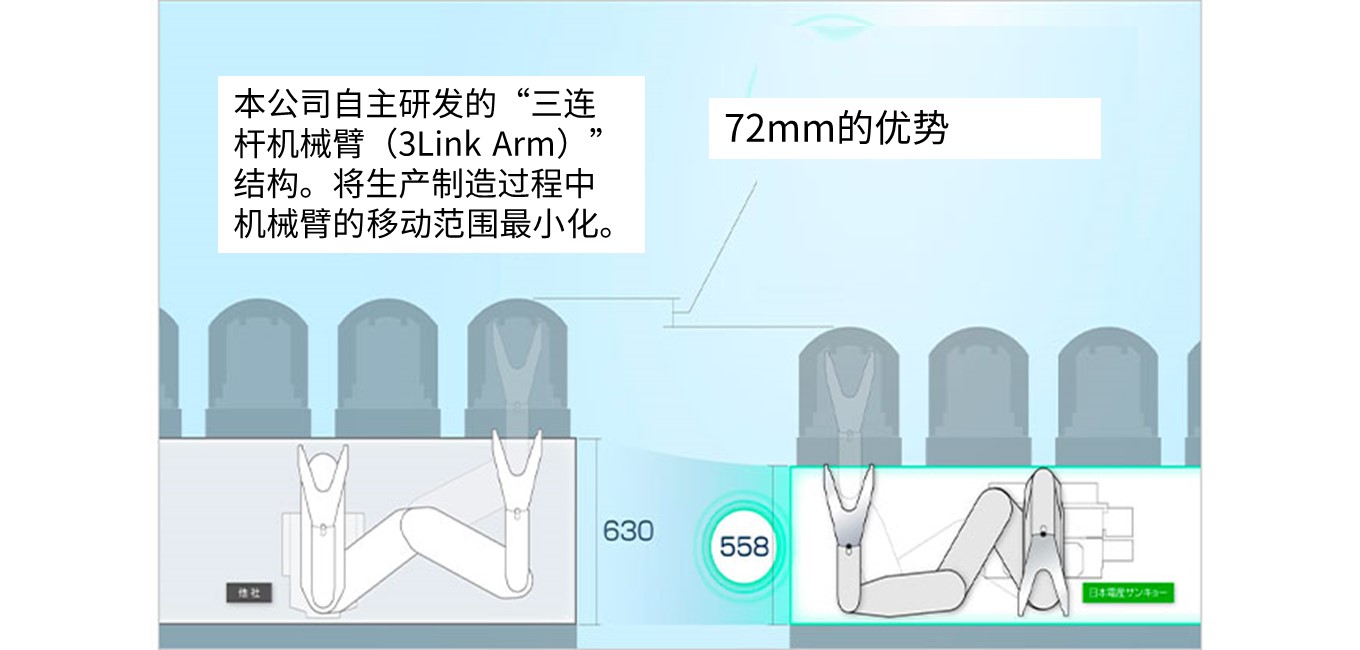
用于搬运的机械臂在前后摆放着的四个暗盒之间来回移动,但通过缩小移动范围,则可以保持半导体制造设备本身的尺寸紧凑。此外还有一项优点是机械臂的总长变长了,因此今后即使增加暗盒数量,只要是三连杆机械臂,即可轻松应对。
可动连杆部分由电机控制。虽然“SR8241”增加了要控制的连杆数量,但使用的电机数量与双连杆机械臂相比并未增多。因此,最大限度地控制了成本的增加。
支持三连杆结构的洁净技术
在半导体制造现场,小至0.1微米的细微粒子都是不允许的。因此,虽然是在洁净室中制造,但制造设备本身也是产生粒子的源头。尤其是具有金属和橡胶相互摩擦的轴承和油封的机器人或机械臂的可动结构是主要源头。
之所以能够在粒子的源头——机械臂增加连杆,是得益于我们拥有避免粒子释放在洁净的空气中的技术。我们在关节处采用了独特的密封结构,防止粒子溢出。
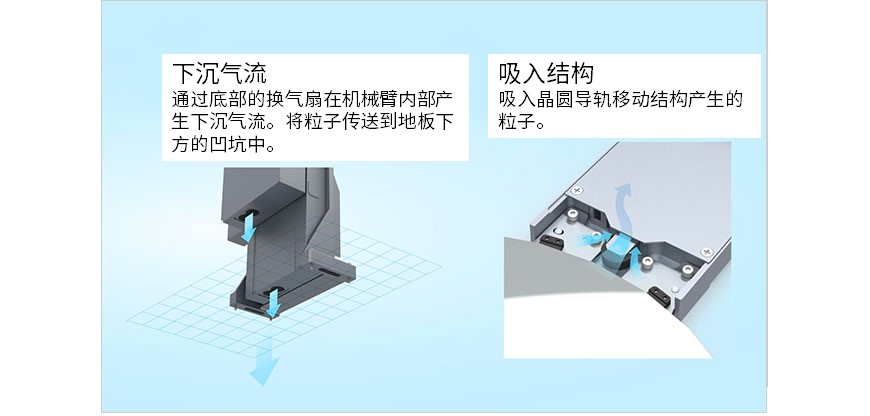
机械臂底部装有排气扇。其内部产生下沉气流,粒子被排放至地板下方的凹坑中。此外,晶圆导轨的移动结构也会产生粒子,但机械臂内部会产生真空,因此采用的是吸入结构,以保持空间洁净。凭借这些技术,“SR8241”获得了ISO标准洁净室分类中最高级别的一级洁净度。
通过使用这种洁净技术,我们实现了移动结构中不释放粒子的结构,因此我们成功采用了可以增加移动结构的三连杆结构。
动作简单,高耐用性得到保障
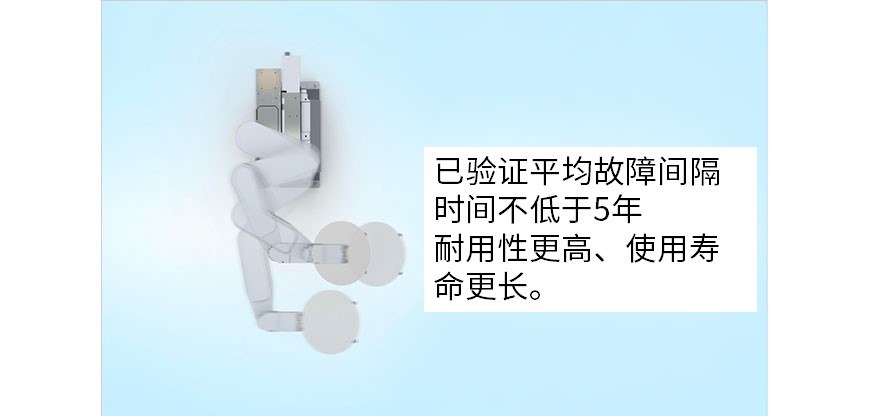
虽然连杆数量增加到了三个,但可以简化机械臂的动作,因此每个连杆的移动量得到了控制。由此,可以减轻可动结构的的负荷,以确保其高耐用性。我们建议每5年对机械臂进行一次检修,但“SR8241”已通过表示设备可靠性的“平均故障间隔时间”证明其耐用时间不止5年
通过与集团公司合作,我们仅凭快速采购到关键零部件的电机,便做到了整体比例佳的设计。可以说,高可靠性的背后离不开尼得科集团团队力量的支撑。
关于本产品的通讯/专栏