
按课题查找案例
Find Cases by Solutions
按课题查找案例
按课题查找案例
Find Cases by Solutions
顺畅、精准的关节驱动
实现服务机器人的顺畅、精准驱动的间接驱动的机制。
尼得科集团持有运用滑环和电位计等顺畅地控制服务机器人的关节和旋转部的技术。
例如,物流搬运机器人在使用上要求365天每天24小时运转,也有像看护用机器人和动力辅助服一样,必须具备非常坚固的结构和较高可靠性的机器人。
这些机器人的关节部和旋转部所用到的导线由于反复弯曲有造成断线的危险。
并且,为了确保精准的运转,需要对关节和旋转部进行精密的传感和控制。
滑环
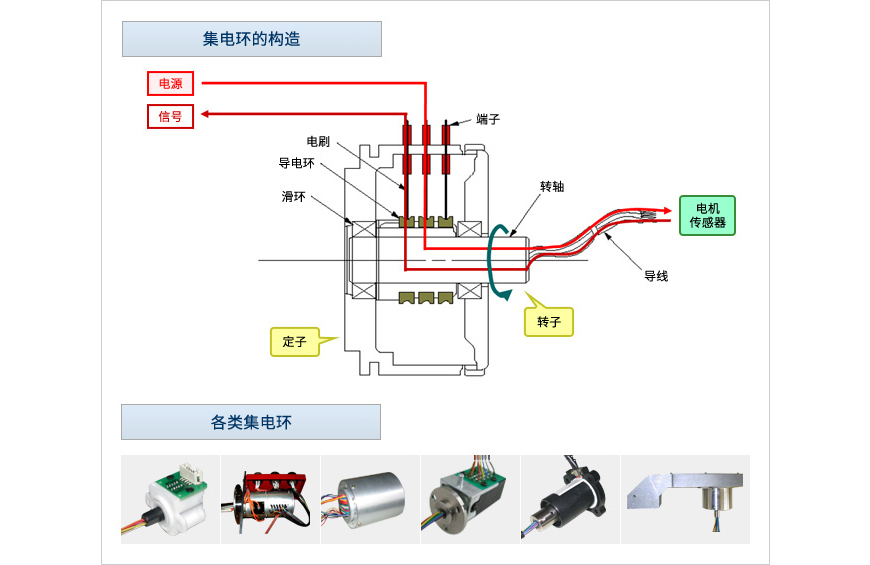
进行旋转部供电和信号传递的滑环
通常,用于旋转部和关节的导线会在轴上卷绕或是扭曲,而反复的扭曲造成的金属疲劳有可能导致断线。若在旋转部、关节部使用尼得科安特赛电机的滑环,可以防止由于卷绕、扭曲、弯曲造成的断线。并且,不仅可以从电源供电,还可以从电源进行数据通信。
电位仪
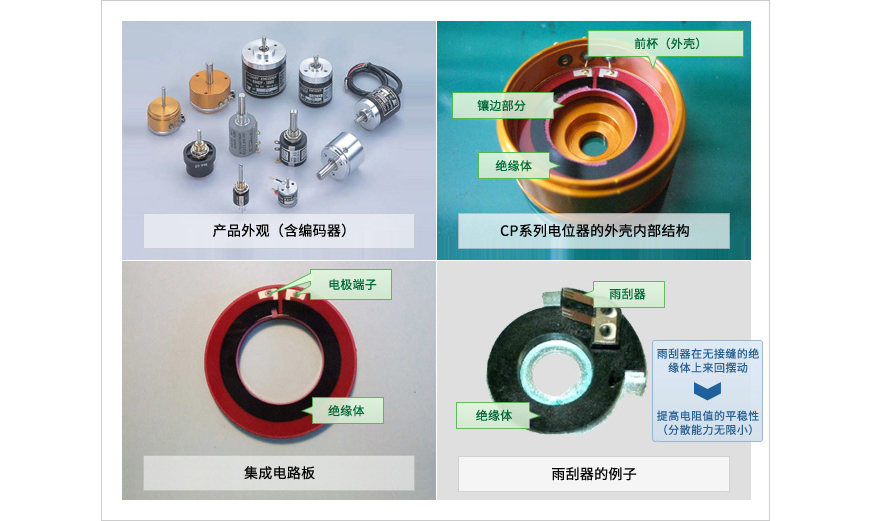
传感正确旋转角度的电位仪
电位仪(※)可以高精度地检测出旋转角度和位置。特别是导电性树脂型电位仪,由于其的滑动阻力极小,而又兼具极高的分辨率(理论上无限小)、长寿命、低扭矩、低噪音的特征,通过将电位仪用于服务机器人的关节,可以进行正确的位置检测和动作控制。
※电位仪由尼得科精密部件、尼得科科智博电子、尼得科安特赛电机设计制造。